The Collaborative Center is a space for engineering academia and industry to collaborate and work together on research projects, share knowledge, and develop new technologies. This center also serves as a hub for networking and professional development. Through collaboration and partnerships, the Collaborative Center is helping to drive innovation and progress in the field of engineering. Github organization
Projects
Partners
Contact C2 @ solar at mdu dot se
-->
Autosail
This project is a collaboration between Mälardalen University (MDU), Universidad de Antioquia (UdeA) and Universidad Tecnológica de Panamá (UTP). MDU is creating a modular platform to enable transfer to a sailboat built by UTP. The platform created by MDU will also be able to integrate a Spiking Neural Network made by UdeA. Aiming to compete in the World Robotic Sailing Championship
Microwave Tomography (MWT) is a technique that uses microwaves to create cross-sectional images for biomedical imaging. MWT has the potential to be used in conjunction with mammography for both detection and monitoring during treatment. Previous research has focused on improving various aspects of microwave imaging. The aim of this project is to improve the accuracy of transmitter placement on the object being scanned, in order to improve the quality of the scan.
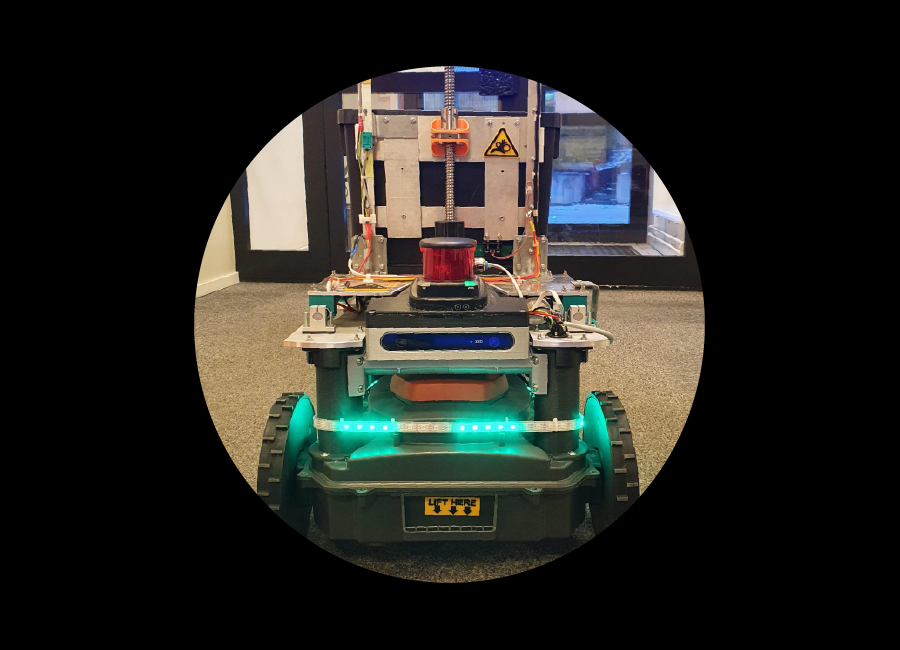
A refuse handling robot built on a Husqvarna 430X lawnmower platform. The purpose is to automate the refuse transport to a central location to positively impact the working environment for the worker and simplify the process for the customer.
A solar powered car for competing in different solar races around the world. Built by students and run by students with help from faculty and industry.
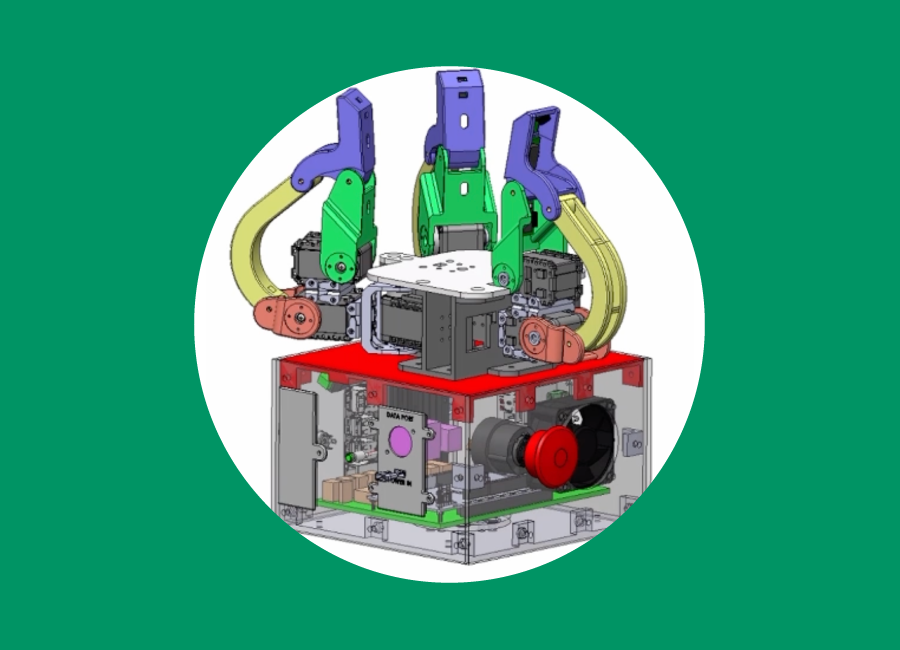
The human hand is a highly advanced structure, both in terms of sensory capabilities and mechanical functions. It is able to grasp objects with great precision and strength through the use of its 29 joints and 34 muscles. Constructing a robotic hand that can replicate the movements and sensory capabilities of the human hand would be a complex and challenging task. In everyday life, the human hand relies on visual information to locate and identify objects, as well as to determine their weight and material properties in order to prepare for a grasp. Through trial and error, humans have developed the ability to grasp objects with a wide range of characteristics and adapt their grasping techniques accordingly. As robots become more prevalent in our daily lives, it becomes increasingly important for them to be able to handle a diverse range of objects in unstructured environments, unlike earlier industrial robots which were designed to handle specific objects in controlled settings. An optimal design for a gripper in this context would be one that can work independently, without the need for any external sensors or vision systems. All computations would be performed internally, and all information about the object to be grasped would be gathered from sensors integrated into the gripper itself. To achieve this, the gripper would need to be equipped with a variety of sensors, including visual sensors to enable it to adapt its grasp to the object, as well as force control sensors to allow it to grasp objects without damaging them. Careful selection and placement of these sensors would enable the gripper to grasp unknown objects without the need for external systems.